From Reflectory Ring to Multivariable System
Abstract
Some special features of feedback functioning in live movement control are discussed. Taking into account the multicoupling nerve structure of movement apparatus we inevitable are faced with a question about principles based in clousing of chanals’ central endings ensemble, which afferentiates movement, on effector centres ensemble which controls muscle periphery. When we speak about movement skill development such afferent-efferent connections (reciphering, as N.A.Bernstein named them) which would be adequate to perform given motor task do not exist in advance and they must to be developed during performing that task. The main role here play human perception of the information resulted from movement performance on the level of motor-sensory transition, when multidimensional vector of muscle dynamics transforms into dynamics of outer object environment. On the basis of selection of perseptual data new feedback structure is created which ensures steady functioning of the effectory patterns finded durng practice.
Themes: Methodology of psychology
PDF: http://psychologyinrussia.com/volumes/pdf/2009/13_2009_nazarov.pdf
Pages: 289-306
DOI: 10.11621/pir.2009.0014
Keywords: reflectory ring, feedback, multicoupling (multilink), motor skill.
In 1947 Nicholai A. Bernshtein published his revolutionary work titled “On the construction of motions”. At first its appearance met fierce opposition: in those times various condition reflex theories had been general ideology in Russian science. Later, however, Bernshtein’s ideas started to propagate more apparently in many psychological branches, not only those directly related to motor behavior. Starting from some moment almost all Russian works in motor performance (and, similarly, many foreign ones) extensively cite basic fragments from his book. The very conception of movement has become deeply related to the name of Bernshtein! True, he continued to receive some portions of criticism – from both dogmatists, and true scholars. This criticism, however, had always been fragmentary and had little to do with main basics of his conception. The multi-sided crystal, which constituted the core of Bernshtein’s ideas about human motion, involved a truly harmonic mixture of empiric facts, imagination, and creative scientific synthesis. When we deal with such harmonic whole entity we cannot change it either by introducing in it something new, or withdrawing from it something “redundant”; such entity stands out of time, becomes eternal and thus gives to descendants ideas for creating more novel, modern harmony. Even stopped in development, it develops others by giving them some potential energy from already created images.
The most wonderful image, that appears in Bernshtein’s works, is his model of living motion. After having conducted a number of research in the biomechanics and physiology of locomotor apparatus he defined the main problem of living motion as the problem of vague, ambiguous relations between commands sent to muscles and the final effect observed in spatial-temporal parameters of motion. In the automatic control theory, which in those times started to shape into a strict (mathematics-based) naturalistic science and which – at least in its general points – was surely known to Bernshtein, this corresponded to the ambiguous relation between force function at system’s input and resulting output; when such system is influenced by disturbing forces, ambiguity is eliminated by means of feedback circuit. Reflectory ring is analogous to closed loop regulating system. Note, that this analogy became apparent and clear to other scholars only after Bernshtein had described it, for he was ready just to such vision of the situation, which has formed in those times in the three previously independent spheres of knowledge, like biomechanics, physiology, and automatic control theory.
The described ambiguity and the way for overcoming it are common points, which are inherent to both living motion and closed technical systems. There exist, of course a lot of differences, also noted by Bernshtein. Most of such differences are well-known: multiple degrees of freedom peculiar to motor apparatus; external and internal reactive forces, that cannot be foreseen; peripheral cycle of interaction, which prevents current state of muscle apparatus (that is object of neural regulation) from been taken into account beforehand; multiple accelerative forces arising when masses of components involved in the kinematic chain of moving organ make their moves. Bernshtein also described (and in great details) one principle, that he as if kept away when developing the model of motor control. I speak here of multi-coupling inherent to neural-muscular apparatus. Berhshtein represented such multi-coupling as image of a horse bearing several riders. Later, in discussing Bernshtein’s theory of multilevel structure of motions, we specially touch the relation between the feedback principle and the principle of multi-coupling.
** *
Thus, owing to feedback it is possible to eliminate the uncertainty that exists in relation between driving function at system’s input and resulting output of regulating system; such uncertainty is conditioned by unpredictable influences coming from external and internal disturbing factors. This advantage of closed loop systems in relation to open loop ones is almost absolute when we deal with technical system – no matter how complex they are. In the case of living organisms, however, – at least those having cerebrum, – usage of feedback principle reveals a number of its peculiarities and limitations. Let take a look at some of them.
1. Closed loop systems are not able to generate new formation in their responses to a definite input function. System with feedback can only work out the input function by repeating it in some way or by transforming it according to preset rule. Newly generated outputs are only possible in the case when direct-link channel includes special transformers. Artificial systems get such transformers from engineering projects; living systems generate such transformers themselves during the process of motor function formation, when such function still do not find an adequate feedback.
2. Any feedback is always parameter-based: it is always realized with relation to specific parameter of regulated object, which is set at the stage of system analysis. If one needs to regulate several parameters of an object, then separate closed loop system with separate feedback chain should exist for every parameter to be regulated. This always takes place in technical automatic control systems, but it often breaks when we build models for closed loop regulation in living systems. In the latter case commonly permissible are pictures in which, for example, visual feedback in the system of motor control is depicted as a single line, implying, however, that this link represents multiple visual channels, each of which bears its own specific data.
The same ambiguity we meet in the model of motor control, suggested by Bernshtein in his paper titled “The burning problems in the regulation of motor acts” (Bernshtein, 1997, p. 342-370). This paper is widely known due to been repeatedly cited by many scholars. In this paper feedback is conceived as consisting of perceptual system (“receptor”) and “comparator”, which compares between the specified and current values of regulated parameter and generates error signal, that is subsequently transformed into correctional impulse. In this model feedback is shown as one-channel, yet Bernshtein specially emphasizes the fact, that motor control is performed not via separate receptions (which, by the way, are also multi-channeled), but on the basis of sensoric syntheses, involving deep integrating processing of “sensory signals of very diverse qualities”. Thus, the feedback link, that goes from “receptor” to “setting device” and “comparator”, represents, in fact, either some set of afferent channels (involving one or more modalities), or set of various “deeply integrated” sensoric qualities[1].
We should note, that even though according to Bernshtein, the degree, in which sensory signals are intergrated, increases upwardly with the levels of motion construction (ibid., p. 272), such integration cannot be absolutely full, because in such case integral signal would correspond to multiple sub-integral components, and thus overall regulating task would become senseless. It follows, that multilinked feedback sends to comparator some complex pattern of signals, whose spatial-temporal organization represents processes, that occurs both in the regulating system (interoceptive channels), and in the controlled object (exteroceptive channels). And such situation takes place even in the case, in which external controlled object changes in one parameter only. Hence, what goes from setting device to comparator also should be a pattern of signals, which is a model for feedback signals.
Here some questions arise, that are not obvious for the theory of automatic control, such as: 1) what is criterion[2] to compare these two patterns? 2) what should be result of such comparison, – especially in the case when both patterns are identical, and overall system accurately tracks preset function and the error signal at comparator’s output becomes equal to zero? 3) what is relation between, on one hand, components of setting function’s signals pattern, and, on the other hand, components of feedback signals pattern? With no answer to all these questions any motor performance model will be something like astonishing fairytale about motion, but not its working schemata.
3. Closed loop systems with automatized regulation work on the basis of error minimization: regulating component in a direct channel of the system produces correctional signal, that correlates to magnitude and polarity of the signal generated by comparator. As a result of such correction error is decreased and with perfectly tuned feedback error gradually comes close to zero. In living organisms both behavior in a whole, and separate motoric acts rarely follow the principle of error minimization, – even when it is needed to resolve task successfully. Normally erroneous motions performed in the process of skill formation – and even intentional increase of error – allow to feel motion better. In experimental situation involving 180o rotation of coordinates of motor and visual fields one can often observe subject’s cursor moving in wrong (sometimes opposite) direction and even when the subject notices his error, he nevertheless continues the wrong motion – as if he was unable to change his motion to right direction. I think the error minimization principle is more characteristic to the final stages of motor skill formation, than to initial ones.
4. Current feedback in living organisms sometimes works too slowly to contribute in quick motions regulation during their performing. These are so-called ballistic or, more generally, quick motions, which last less than 0.5 sec. Nevertheless, such motions are characterized with high accuracy, stability, and disturbing factors tolerance. Surely, this does not mean, that quick motions do not need feedback at all, – though such views are often expressed by some scholars. Rather, limited feedback (mainly interoceptive and related with lower, background levels of motion construction, where neural pulses run fast enough to provide for closed regulation in motoric automatisms) takes place here. Exteroceptive components of feedback prove to be as if separated in time from the motion performed and are used post factum to correct future realization (which is pre-played ideomotorically).
5. With the exception of elementary reflexes, human motor skills are not ready-given. Dynamics of their formation consists of several successively-parallel stages (for detailed their description see: (Bernshtein, 1997, р. 226-284). As recent researches show, handling with mastered motor skills also has its proper microdynamics, which reflects different conditions of performing motor action (Gordeyeva, 1995; Gordeyeva, and Zinchenko, 1982). All this tells us, that there is no rigid, forever-fixed relation between output of motor system, on one hand, and afferentation transmitted via feedback channels, on the other hand: one and the same final effect of motion may correspond to its multiple perceptual images. Therefore, not in all cases feedback can be preset in corpore: it should be either constructed together with the motion under construction (if we speak of its formation), or reconstructed according to new conditions (if we speak of motor control). Till now we didn’t meet such situation (as far as we know) in the automatic control system, where feedback with all its addresses and characteristics is always preset and rigidly connected to the specific parameters of controlled object.
6. Along with uncertainty “from below”– that is, in relations between outputs of motor channels, on one hand, and afferent inputs of feedback channels, on the other hand, we find also uncertainty “from above” – that is, in relations between the cortical endings of afferent pathways, and the origins of efferent pathways, which innervate plentiful muscles of the overall motor system. One couldn’t trace a way in cerebral cortex that linked separate afferent neuron to a separate efferent neuron. Cerebral cortex present a multilink neuron network, where neurons are interlinked “each-to-each”. “While in underlying systems we find separate nuclei, which are linked between each other with fiber bundles, that are relatively easy to analyze on the ground of their neuronal composition and hierarchical interrelations, cerebral cortex is constructed as continuous cellular layer quilted in all directions with also continuous layer of white substance fibers” (Bernshtein, 1997, p. 143). It is clear, therefore, that any specific closed loop regulation system, in which circuits of direct links and feedbacks would have definite starting and ending addresses, cannot be constructed basing on neuro-anatomic data only. Maybe, this is why all the theoretical models dealing with motor control look some fantastically and motions demonstrated by robots look comically. They lack auto-regulation chains capable to work in the conditions of uncertainty and inconstant links – at the levels of both coordinating subsystems, and the spot where motoric realization meets with its perceptive representation.
Brain neuron network with all its multiple channels including direct links and feedbacks forms multilinked regulating system, which potentially capable to do anything, but in reality possesses only those abilities, which are created when structurally varied subsystem are formed in the network. Such variations are formed by way of feedback shortening both at the level of regulated object, and the level of higher coordinating instances. In the first case condition of feedback shortening is the limitation or selection of those object parameters, regulation of which is essential for solving motor task at hand. In the second case condition of feedback shortening is the search and selection of those direct link channels, which essentially influence the selected parameters of regulation. Switching on a certain feedback channel (that is, specific kind of afferentation) to the input of direct-link (efferent) channel seems to occur according to “maximal impact” principle: a feedback link is selected, which ensures maximally changes in response to given regulating impact[3].
Basing on the aforesaid, we may conclude, that the notion of reflex ring should be re-conceptualized into the notion of reflex rings system. This new conception is grounded on the idea that interrelations between the sets of direct and feedback links initially are not determined. More specifically, this notion implies that living regulated systems come to be closed only in the process of their functioning, but initially their physiological substratum does not have such property. Exclusions are only primitive reflectory acts, that are realized by lower divisions of central nervous system, where feedback seems to serve not so much for regulating motor process, as for starting and sopping it.
The idea, that feedbacks are acquired as a result of subject’s activity, is directly related to the stage of motor skill formation, which Bernshtein called “phase of identifying needed sensoric corrections”[4] (Bernshtein, 1997, p. 238). “It is this phase where central nervous system intensively collects flows of receptions..., that are characteristic to all the manifold of external and internal variations of motion, streams of sensations, that cannot be observed on any extraneous subject” (ibid). Whereas in preceding phases, where leading level and motion content were defined, human subject formed preliminary idea about motions (that is, how they should look from aside), in the phase of finding out needed corrections subject “comes to how both these motions themselves, and those sensory corrections, which control these motions should be felt (from inside)” (ibid).
** *
Process of feedbacks acquiring is closely related to the dynamics of motor skill formation. In the formation conception, suggested by Bernshtein, the dynamics consists in gradual creation of sensoric syntheses at different levels, so that these syntheses serve as a basis for developing at each level an adequate for a given motor correction task; as these sensorimotoric complexes arise, technical functions related to motor control are passed from the leading (higher) level to background (lower) levels. Let’s discuss this second component of formation dynamics in more details.
At the beginning of skill formation motion is performed “with the aid of ersatz corrections, that are like temporary scaffolding, by means of which building of stone would be further constructed” (Bernshtein, 1997, p. 234). Such corrections are generated by cerebral cortex. “Only cerebral cortex is capable to respond with an adequate motor reaction to new unfamiliar irritations. Sure, the load, which cortex bears at the beginning of skill development, forces it to take upon oneself such motor tasks, that are little specific to it” (ibid). Further Bernshtein writes: “Gradually developing skill, central nervous system finds opportunity to reassign background motor corrections to respective background levels of construction, – to those levels, which in the quality of their afferentations are mostly fit to performing namely such corrections” (Bernshtein, 1997, p. 235). In front of us is a scheme, in which central device takes upon oneself functions, that are not characteristic to it, and with time, when the device “becomes sure” in own incompetence, assigns the functions to peripheral devices and thus releases oneself for other kinds of tasks. Maybe, such scheme is sensible and able to work. So before talking about its shortcomings, let’s discuss an alternative approach, first making one major reservation. The fact is that the idea of descending from center (upper level) to peripherals (to lower levels) which underlies Bernshtein’s model of skill formation, does not necessary relate to his theory of motion construction: the latter is a self-standing conceptualization. So what I say below with regard to the dynamics of formation does not relate to the basic idea about the multilevel motion construction.
When discussing above motor act as multi-linked system, we spoke of shortening between afferent channels, which transmit feedback signals, and efferent channels, bearing direct link on the basis of maximal impact principle. Such shortening may occur not only in cerebral cortex, but also in other morphological structures, that involve neural networks, – such like cerebellum, thalamus, or medulla. Bernshtein described in details how these departments take part in the construction of motion at different levels. When feedback signals come to cortex, they cannot bypass intermediate levels underlying cortex. These afferent relays are somehow or other linked to similar relay points, that present in efferent ways. Thus, if we omit anatomical names given to morphological substrata, then more general scheme of motor control would look like multi-linked system shown in Fig. 1.
We should remind that each contingent of motions corresponds to its specific content of elements and pattern of links between them; yet in any case they represent one particular version of more general scheme which is characterized with the following properties:
- structure (anatomic and functional);
- degree of connectedness (coefficient of interaction);
- dynamics (coefficients of interaction or functional structure change in time);
- polarity (inhibition or exitation).
Being different in these parameters, each concrete subsystem also has its specific morphology (for example, neurons in cortex are different from neurons in reticular formation that is found in medulla) and consists of different number of components.
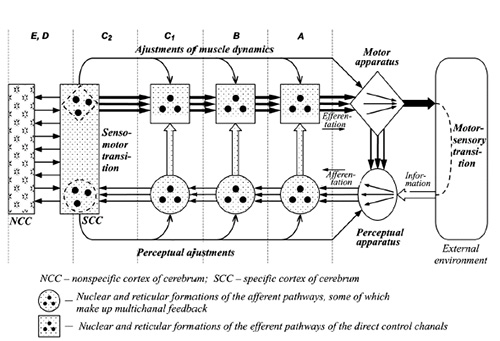
Figure 1. Multicouple system of movements control
А, В, С, D, Е – levels of movement construction (N.A.Bernstein's designation), respectively level of paleokinetick control, of synergies and stereotypes, of spatial field, of actions, of symbolic coordination
In the context given scheme dynamics of motor skill formation may be represented as gradual change of parameters in the partial subsystems of different levels. Such changes occur simultaneously at all levels, though sequential modification remains possible. What is most important, during all the period of motor skill formation each level performs only its specific functions, not passing them to other levels.
Changes in the subsystems’ states result in such configuration of multi-linked system, which meets specific motor task. What, however, causes these changes and directs them in a proper course? So far we can give only most general answer to these questions. The part of neural network in the cortex of cerebral hemispheres, that constitutes brain substratum of subject’s actions, is the immediate regulator of state that affects all subsystems (afferent and efferent). Remember, that Bernshtein referred to the cortical level of motion construction (see “D” in Fig. 1) as to “level of actions”. True the notion of action in his works was not so differentiated as it has become recently (see, for example, Gordeyeva, and Zinchenko, 1982). However, the inconspicuous Bernshtein’s pass from physiological language to psychological one reflects his intuitive conviction that action and motion are naturally indivisible things. At the start action may be only motional; motion at its start is both the content, and form of action. Subsequently motion acquires other forms: it may become perceptive, mnemonical, mental, reflexive, – yet all kinds of actions originate in motor behavior, that gradually becomes more complicated. Speech (talking aloud or inner) is the highest grade of motion development. Speech also helps to start the differentiation of motional action and the formation of new, already autonomous forms, in which proper motion either becomes an operation (as, for example, in handwriting), or reduces completely. Components, functional structure, and microdynamics of executive (motor) action are described in details in Gordeyeva (1995). She continues to develop the level theory of motion construction – however, not by means of completing it with more higher levels (Bernshtein did not find for this, at least, morphological foundations[5]), but through experimental analysis of executive action, in which development of morphological substratum finishes and development of functional organs and system starts.
The so-called “functional” organ differs from any anatomical one not only in the number and complexity of nervous components and links between them. Its major qualitative distinction consists in its ability to capture and constantly reproduce those transient, quickly vanishing, changeable – and often barely perceptible – events, which are characteristic for subject’s interaction with his or her environment. Functional organ doesn’t represent characteristics of an individual and his\her environment being taken separately, but instead it represents something that arises when individual and environment interact with each other and disappears when the interaction stops.
From psychological view functional organ constitutes the internal means of action. From the view of neurophysiology this is a multi-couple system, whose states (described in the examples given above) set up structure and dynamics of sensorimotoric links, that are trailed for solving given motor task. At higher levels of cortex this system is nonspecific and universal; enormous number of its components allows to create infinite number of polytypic links, which shorten or intermediate switching afferent endings between origins of efferent pathways. Similar networks one can find at all lower levels of motion construction, but they are not so universal and their specificity grows as we get more close to peripherals; besides, state of these background networks is almost entirely set up by directives from above. These directives set up values for parameters of interactions that are relevant to a given action or its current quantum. Remember, that these parameters define not only structure, but also dynamics of the concrete subsystem along the whole length of action.
Our view of motor control mechanisms as of multi-coupled systems should not be regarded as mere a quantitative complication of our views about this issue – which is anyway complex enough. The point is that there is multiple reflex rings instead one ring, and multiple interrelated channels – both afferent and efferent – instead of only one channel (or, at least, several channels with different modalities). All these important facts, which have been simply ignored till now or implied – and remained outside theoretic conceptions, for it’s very hard to cope with them because of a number of reasons.
However, if we acknowledge these facts and take them into consideration, then the conception of multi-level motion construction should undergo some modifications. As we spoke earlier, dynamics of motion skill formation looks differently: leading level does not produce any “ersatz corrections”, thus taking upon itself functions of more lower levels which are not characteristic to it. Instead, from the detailed information that comes to it from “below”, it selects and amplifies data and relates each level with such information, which is most sensible to given effectory impacts; if these impacts turn to be inadequate (sometimes several reiteration are required – let they be even erroneous – to discover this), then a modification, or change of effectory pattern occurs and afferentation that is most sensible for this new pattern is looked again for. Seeking stops and amplification mechanisms for newly found afferentation are turned on according to the criterion of successful decision of given motor task[6]. Only after selection of afferentations, induced by the motoin, is finished and each efferentation receives its own efferent address through network structures in all levels a full-fledged sensorimotoric system arise which able to perform in a tracking manner. Thus, four major regulating functions of leading level in the process of motor skill formation are:
- initiation of motion, that corresponds to given motor task;
- selection of afferentation, that is most sensible to changes in the surrounding setting, evoked by motor impact (maximal impact principle of selection);
- amplification of relevant afferentation;
- shortening links between the selected pattern of afferent channels and the efferent pattern of initiated motion; such shortening is fulfilled via neuronal networks, thus forming functional sensorimotoric conversion.
Three latter functions require repeated training, during which parameters of newly formed neuronal interactions (both specific and nonspecific) are worked through (simultaneously, or – what is more usual – sequentially) at all levels.
The second modification is related to sensoric synthesis. As follows from what we said above, to provide sensoric synthesis with enough freedom and space for selecting appropriate afferentations the latter should first be as detailed as possible, thus providing information literally about each little thing generated in the external setting under the impact of each nuance of the motion being performed. Such accumulation of motorsensory experience is necessary condition needed to form complete feedback circuit in the motor control system. Otherwise, when one proceeds from the conception of sensoric synthesis, such experience remains only on peripherals’ own; and central departments receive only some synthetic qualities – general, or integrated information. Here occurs, as it were, a “meeting” between psychological integration of sensoric experience, on one hand, and on the other hand, integration at neuronal level, which meeting results in desired psychophysical unity.
Meanwhile, it is a question of different integrations: first of them rests on subject’s experience in dealing with objects, whereas the second results from summation or modulation of neural electric signals, convergence of various impulses into one neuron; with all this, the more such impulses come to neural cell, the higher level of integration. The idea of neural integration is easy to see: if splitting (both inter- and intra-modal) of an object’s physical properties (that’s why we call our senses analyzers) occurs at receptional level, then by way of neural integration in the specified sense (another sense of the notion visibly doesn’t exist) information about object’s details, as it were, joins into a whole at higher levels of central nervous system, thus creating image of the object. But summation is not integration or synthesis in strict sense and also object’s image[7] cannot be constructed by means of multi-channel and multi-level convergence. Moreover, today we may state with confidence, that no afferentation on its own having been processed with arbitrary complexity can form a living image. The latter is, in fact, a kind of “functional organ” hence it is formed in subject’s action. Of course, we shouldn’t address this reproach to Bernshtein, who occupied strongly anti-mechanicist position. Yet, what exactly he meant under the notion of “sensoric synthesis” remains unclear. He spoke neither of image, nor of integration. Seems like the question “what is it?” shall remain unanswered forever[8].
In the context of multi-linked motor control the issue about the “synthesis” of afferent information we should resolve in another way. Anatomical mechanism of neural integration (both inter-level, and with different modality) determines its maximal possible degree for each level; as to real degree of integration taken in the range from its maximum to zero, it depends on the parameters of neural network at background level. These parameters are controlled by leading level according to the requirements of current quantum of action. Note, that when degree of integration equals to zero this means complete blocking in its neural links; in this case information passes only via specific afferent channels, while keeping its original precision. Thus, presence of apparatus responsible for neural integration at each level together with maintaining specific afferent channels allows to perform both operative selection of required afferentation, and its operative chunking by means of manipulating parameters of neural networks.
Similar processes occur also in the efferent channels of multi-linked system. The principle of common ending way, hypothesized by Sherrington, is motor analogue of afferent integration: motoneuron’s activation depends on summary impact that acts upon it from many efferent pathways, that take their origins in different departments of central nervous system. Here again, anatomical links determine maximal possible impact influencing over motor unit; real structure of these influences depends on the state of neural network that takes place at each level of motion construction. States of networks are operatively controlled by leading level[9].
Finally, our last consideration deals with the conversion (decoding) unit. In the Bernshtein’s model the unit looks like most enigmatical: “We almost nothing know about physiological properties and even about neural substrata of the components marked as 5 and 6 (decoding unit and effector control respectively. – A.N.’s note)” (Bernshtein, 1997, p. 359[10]). Meanwhile, Bernshtein uses this term frequently enough. He defines decoding as follows: “...rather complex reciphering is required to make translations from the language of special-kinematic views, in which primary project of motion is designed psychologically, to the language of virtual muscular dynamics; in addition, the better motor skill is elaborated, the more complex and fanciful the second language is”. In fact, one modus of the psychophysical problem is conceptualized here: how mental image is transformed into neuromuscular dynamics? Seemingly, if we continue to formulate this question in such a way, we will not be able to answer it still for long time. The point is that reversed question is much more important and easier to investigate: how neuromuscular dynamics is transformed into a mental image? Their was motion at the beginning. Great number of spontaneous effectory commands reached many muscles via the pathways that nature prepared and generated various motional manifestations (remember, for example, how infant quicken at the sight of their parents). These manifestations were perceived by the motions’ authors in both inter-oceptive (through proprioception), and exteroceptive pathways, and then transformed into polimodal afferent patterns. This motor-sensoric transition (see Figure 1), which forms external half-ring of still unclosed system, has very profound sense. First, owing to the motor device construction, force field created by multiple vectors of muscles’ dynamics, transforms here into the spatial-temporal pattern of moving object (be it hands, or tool, or something else). Second, when motion affects environment, it comes to be felt not only as diffusive effectory arousal, that origins somewhere inside, or as “dark muscle sense”, but instead it is felt as differentiated perceptual cues of object-related meanings. Just these perceptual cues form the content of afferentation, which passes through all departments of central nervous system and then gets into the highest its instances. Here afferent pattern meets with current efferent pattern, which has initiated perceptively encoded motion. During all the process of motoric implementation each efferent package entails respective afferent response. At start these afferentation are used to shorten sensorimotoric links at various levels; multiple reiterations of the same motion is characteristic for this stage. Later these repeated motions are deposited in memory and thus form a basis for expected afferentation to arise at the moment when motion is already intended, but still not started. This expected afferentation joins with the afferentation that is contained in the driving image of motion: this does not entail any problem, for both these afferentation are represented in the same language of object-related meanings. Afferentation from driving image together with expected afferentation from memory make up a part of “comparator”, in which they are compared with current afferentation coming from motion (for details see: (Nazarov, 2005)). For not to draw away from the issue of decoding we don’t describe here further operations that follow. We may conceptualize that re-codings are accomplished at the level of [motorsensoric] transition, when motion and its effect – voluntarily or not – become an object of perception. They are localized not in organism, but in environment. Sensorimotoric transition is fulfilled inside organism through the system of specific and non-specific nervous links. This transition is controlled by cognitive components of action[11], which is, in fact, the leading level of motion construction.
** *
When human being meets new motor task, he or she still doesn’t have a ready feedback circuit to solve the task “on-the-fly”. Feedback may be only partial and rough. Full-fledged feedback formation proceeds simultaneously with the search and initiation of impacts arising in direct efferent route, which functions at this moment in open or half-open circuit using only local interoceptive feedbacks at lower levels in order to stabilize neuromuscular dynamics. Shortening all feedback channels (or completing feedbacks’ addresses assigning) from both [motorsensoric] (in environment), and sensorimotoric (in organism) transitions takes place after selection of adequate afferentation at all levels and respective functional structure of neural network formation are accomplished; inter- and intra-level, inter- and intra-modal links are also established via neural network. Similar processes flow in direct links of efferent channels: commands from muscles, which originally initiated motions, are modified by feedback they acquire and come to their ending points through the ways that are marked by top-down influences that come from upper levels and consolidated in the selected structures of neural networks. Thus, one major intermediate objects to be controlled at all levels of motion construction in both afferent and efferent routes is neural network, whose functional state is set up by specific values of parameters listed above. To investigate the principles of how such states are formed (it seems that the principle of maximal impact is not the only one) while taking into consideration motor functions characteristics is one topical task, to resolve which we should use the three scientific fields contemporary to Bernshtein and mentioned at the beginning together with modern psychology and computer simulation.
References
Bernshtein, N.A. (1997). Biomechanika i phisiologiya dvizhenii [Biomechanics and Psychology of actoins]. Moskva: Institut prakticheskoi psichologii; Voronezh: NPO MODEK.
Chkhaidze, L.V. (1965). Koordinatsiya proizvol’nyh dvizhenii cheloveka v usloviyah kosmicheskogo poleta [Coordination of Self-produced Movements of the Person in Conditions of Space Flight]. Moskva: Nauka.
Gordeyeva, N.D., and Zinchenko, V.P. (1982). Funkzional’naya structura ispolnitel’nogo deistviya [Functional Structure of Executive Action]. Moskva: Izd. Moskovskogo gosudarstvennogo universiteta.
Gordeyeva, N.D. (1995). Experimental’naya psichologiya ispolnitel’nogo deistviya [Experimental Psychology of Executive Action]. Moskva: Trivola.
Nazarov, A.I. (2005). Psychologicheskaya model dvigatelnogo deystviya [Psychological Model of Motor Action]. Vestnik Rossiyskoy Academii estestvennih nauk, 1. P. 89-94.
Nazarov, A.I. (1970). Opyt issledovaniya koordinatsii gruppovogo upravleniya [The research of the Group Coordination Management]. Moskva: Izd. Moskovskogo gosudarstvennogo universiteta.
Notes
[1] Bernshtein adhered the second version. In his comments to L.V. Chkhaidze (1965), who upheld the first version, Bernshtein wrote: “weak place in Chkhaidze’s conceptualization is undoubtly his excessively schematized sharp division not only between primary information flows running from exteroreceptors to proprioceptors, but also between further intra cerebral tracts – right up to closing respective reflectory chains. Such divisions are wrong... It is already deeply and actively processed sensoric complexes, in which signals from various kinds of peripheral receptors, – signals, that have been processed in local nuclei beyond recognition, – combine together, that reach central devices performing actual controlling and coordinating functions” (see Bernshtein’s preface to Chkhaidze (Bernshtein, 1965, p.14–15)). Here and further – Author’s notes.
[2] It is quite possible, that such criteria are multiple.
[3] For more details about feedbacks structuring in multi-linked systems see: (Nazarov, 1970).
[4] Strictly speaking, correction is a response of the regulating component in tracking system to the error signal, generated by comparator. The notion of “sensoric correction” should be viewed in the sense, that correctional source is the sensoric signals, which run via afferent part of reflectory ring; whereas correction itself is related to the efferent part of reflectory ring and is possible only after error is calculated.
[5] “Apart from primary fields and layers... and secondary ones, which closely adjoin them..., all others [citoarchitectonic] departments in hemispheres’ cortex do not demonstrate any noticeable hierarchical interrelations, – and, maybe, their interrelations do not form any permanent pattern” (Bernshtein, 1997, p.143).
[6] Success, been achieved as a draft version of sensorimotoric trail, does not decide itself anything: it should be else strengthen through the perfectioning motion’s details and finding for them respective patterns of afferentation.
[7] We mean not mathematical, but rather living image.
[8] Bernshtein’s own conceptualization of “sensoric synthesis” (ibid, p. 51–52); that we cited above, also contains many unclear aspects in the defining words.
[9] Leaving apart the morphological differences between afferent and efferent formations in central nervous system, one should note, that neural processes in them are, in essence, identically structured.
[10] For now, we might say the same.
[11] Image of motion and idea about final result, which, according to Bernshtein, are major determinants of motional act, constitute only part of cognitive plan of action.
To cite this article: Nazarov A.I. (2009). From Reflectory Ring to Multivariable System. Psychology in Russia: State of the Art, 2, 289-306
The journal content is licensed with CC BY-NC “Attribution-NonCommercial” Creative Commons license.